


Robot Delta D3PM-1100-P15
Charakterystyka produktu
Charakterystyka
1, standardowy czas cyklu jest krótszy niż 0,6 s, co spełnia Twoje dążenie do dużej prędkości i minimalnej głośności.
2. Zaawansowana konstrukcja silnika obrotowego na ruchomej platformie umożliwia łatwe osiągnięcie przez robota wysokiej precyzji obrotu.
3. Robot jest idealny do operacji w wąskich przestrzeniach, a także do szybkich i precyzyjnych prac w polu 3C.Szeroko stosowane przy montażu, obsłudze i testowaniu małych elementów.
Parametry produktu
| Typ | D3PM-1100-P15 | |
| Osie | 3+1 | |
| Ładunek | 15 kg | |
| Manipulator | Waga | 113 kg |
| Średnica | 1100 mm | |
| Powtarzalność | Pozycja | 0,05 mm |
| Obrót | 0,025° | |
| Maksymalna prędkość | 350 str./min | |
| Zakres obrotu | ±360 | |
| Dopuszczalny maksymalny moment bezwładności | 0,224 kg.m2 | |
| Zakres kąta ramienia uruchamianego | W górę | 23,5° |
| W dół | 70° | |
| Zasilacz | Trójfazowe 380VAC -10%~+10%, 49~61HZ | |
| Moc znamionowa | 10 kVA | |
| Moc znamionowa | 6,2 kW | |
| Temperatura przechowywania | -10 ℃ ~ 70 ℃ | |
| Środowisko pracy | -10 ℃ ~ 50 ℃, wilgotność względna ≤80% | |
| Ochrona | IP55 | |
Rysunek produktu
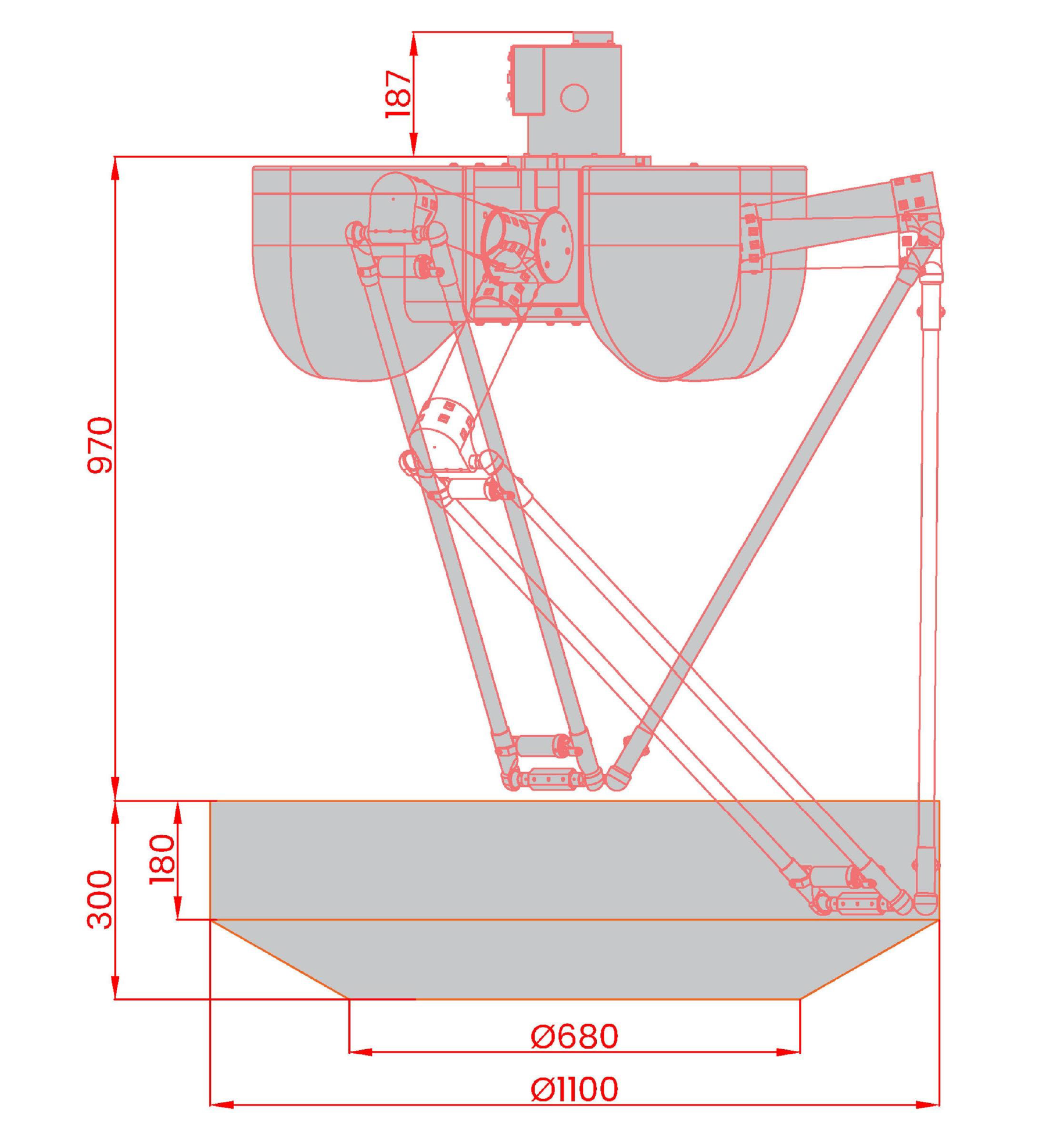
01. Wymiary i zakres roboczy (mm)
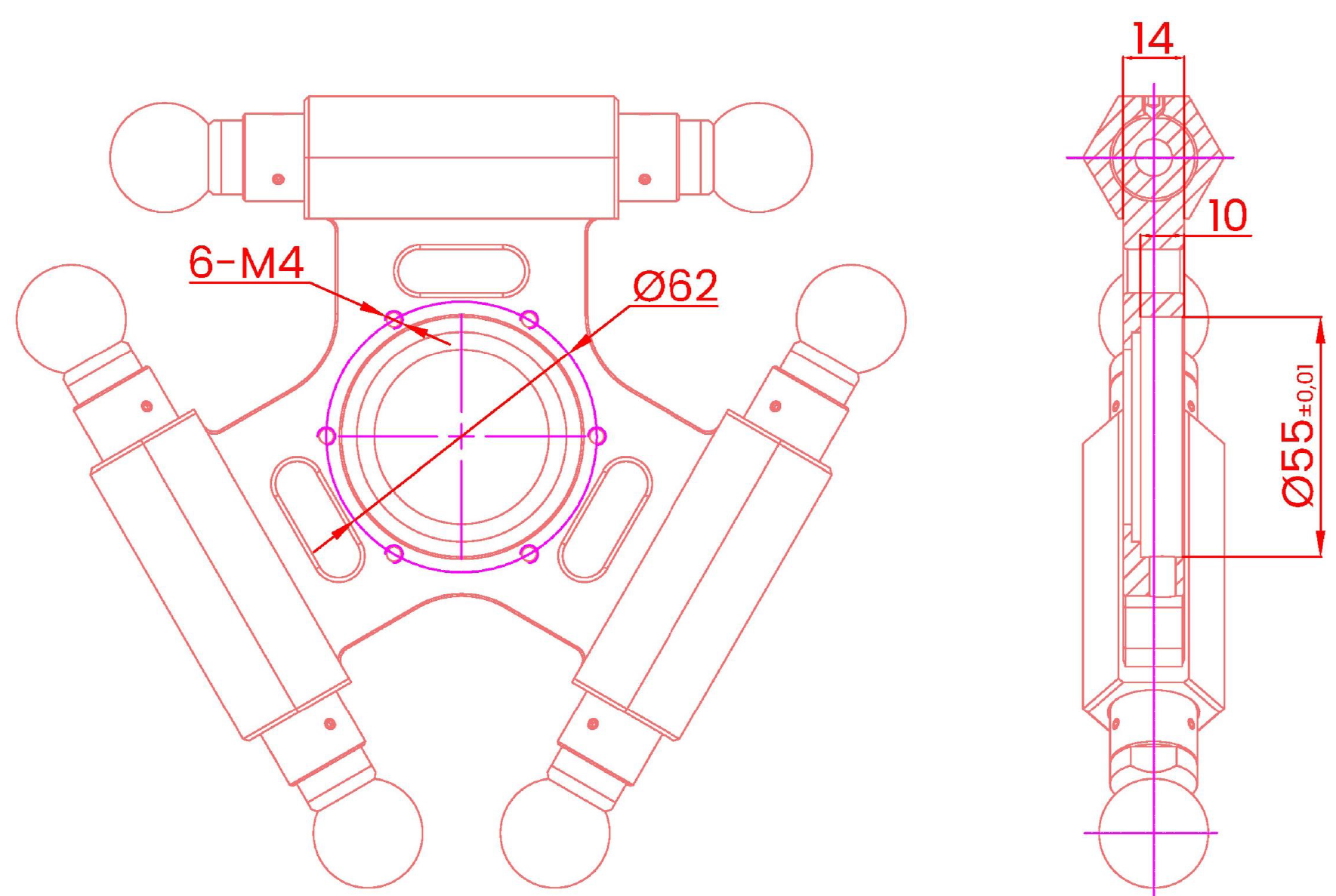
02. Kołnierz (mm)
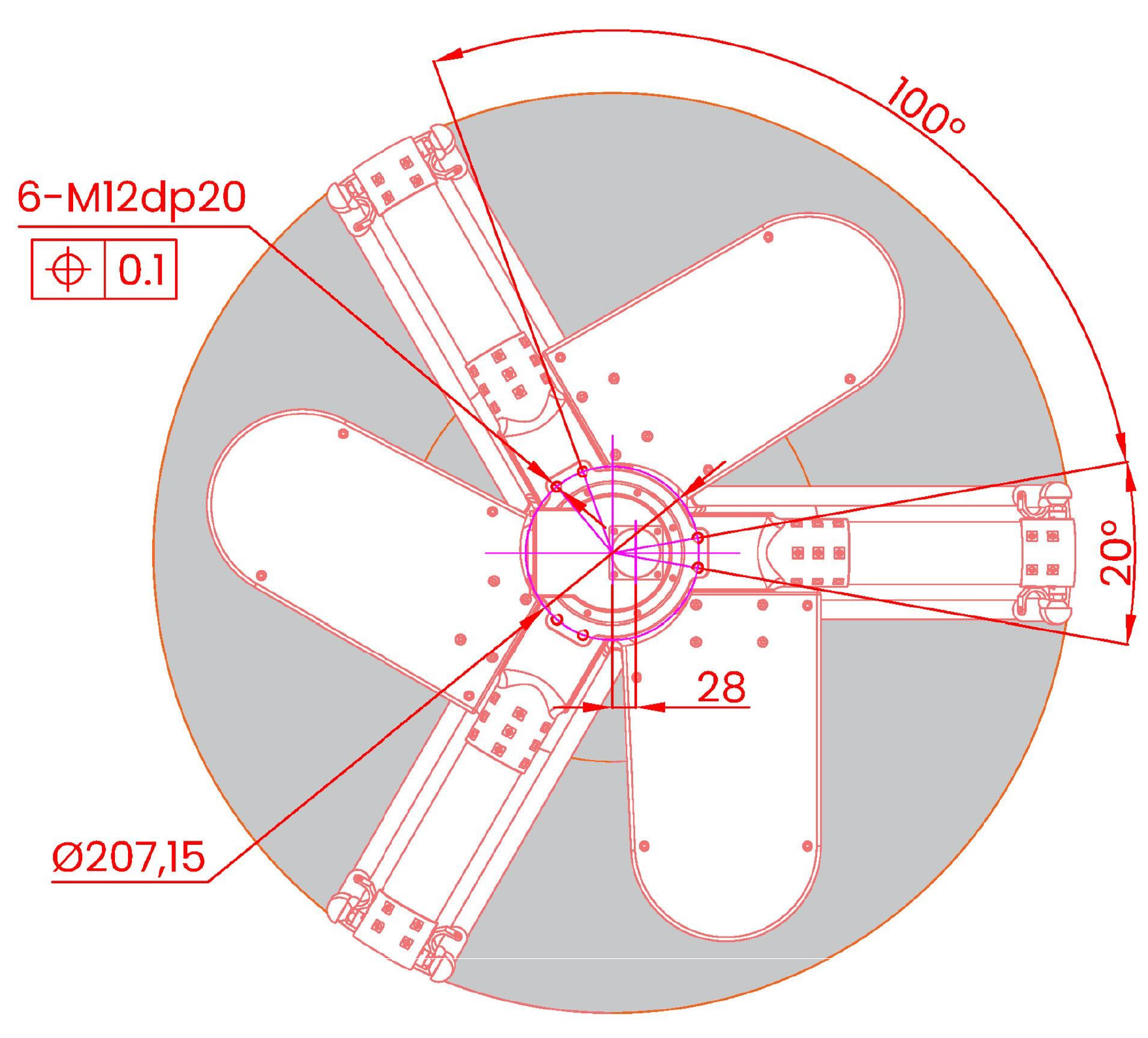
03. Instalacja podstawowa (mm)
Napisz tutaj swoją wiadomość i wyślij ją do nas





